基本信息
姓 名:南智雄
性 别:男
职 称:副教授
电子邮箱:nanzx@wnmb900.com
研究方向:人工智能、计算机视觉、深度学习、自动驾驶、人机交互
个人简介
南智雄,男,wellbet吉祥手机官网·(中国)责任有限公司官网副教授。加州大学洛杉矶分校(UCLA)联合培养博士,西安交通大学大学博士、博士后,西北工业大学学士。主要研究方向是自动驾驶和人机交互,在IEEE Transactions on Image Processing、IEEE Transactions on Neural Networks and Learning Systems、IEEE Transactions on Intelligent Transportation Systems、Pattern Recognition、AAAI、ACM-MM、IEEE Intelligent Vehicles Symposium、IEEE International Conference on Intelligent Transportation Systems等期刊和会议上表论文20余篇。主持或参与国家重点研发计划项目课题、国家自然科学基金委重大项目课题、国家自然科学基金委青年基金等多项课题。与加州大学洛杉矶分校、麻省wellbet吉祥手机官网学院、wellbet吉祥手机官网wellbet吉祥手机官网大学等多所国外知名大学的学者保持合作交流关系,与国内多个车企、自动驾驶独角兽公司、wellbet吉祥手机官网源汽车公司保持合作交流关系。
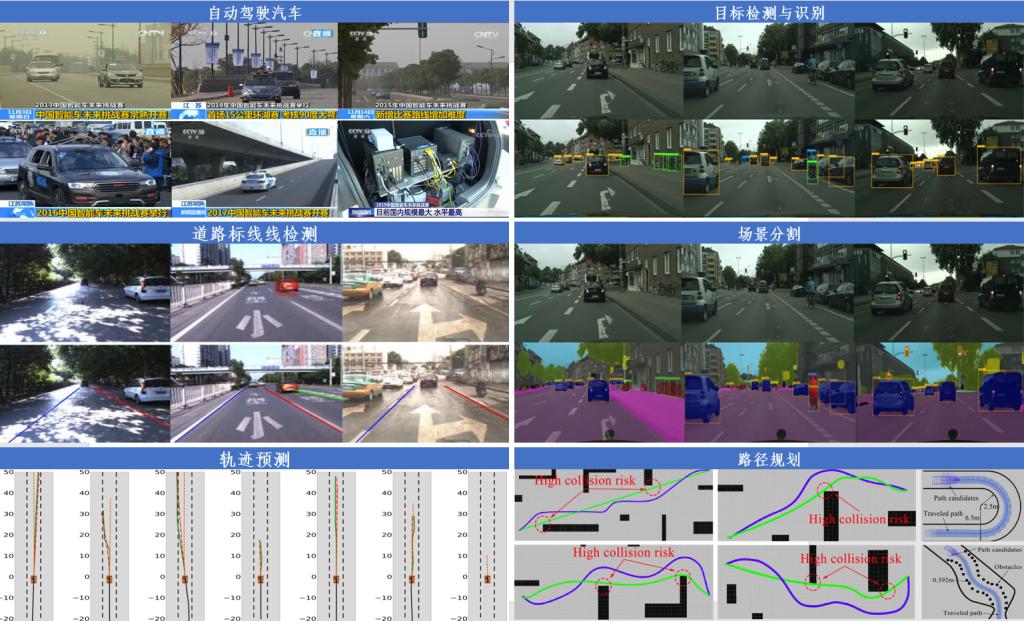
研究兴趣1:自动驾驶
2013年以来一直从事自动驾驶相关研究,多次参加国内规模最大、水平最高的无人驾驶赛事—中国智能车未来挑战赛,2017年获全国冠军。针对自动驾驶中的若干问题,具体研究兴趣包括:(1)道路标线检测、(2)目标检测与识别、(3)场景分割、(4) 轨迹预测、(5)路径规划、(6)激光和视觉SLAM。
研究兴趣2:人机交互
如何使机器具备较高的智能水平,从而能自然和谐地与人进行交互,协助或者代替人类完成生产生活中各项任务是人类科技发展的长远目标。为了实现这一目标,首先需要研究如何使机器理解人类,具体理解人在看什么、干什么、想什么。围绕这一主题,具体研究方向包括:(1)第三视角注意力和意图预测、(2)第一视角注意力和意图预测、(3)基于生物认知的视觉和语言联合推理、(4)零样本属性-物体组合识别

论文发表
[1] Zhixiong Nan, Jingjing Jiang, Xiaofeng Gao, Sanping Zhou, Weiliang Zuo, Ping Wei, Nanning Zheng*. Predicting Task-driven Attention via Integrating Bottom-up Stimulus and Top-down Guidance. IEEE Transactions on Image Processing(T-TIP), 2021. (JCR 1区,wellbet吉祥手机官网院1区,CCF A)
[2] Zhixiong Nan, Tianmin Shu, Ran Gong, Shu Wang, Ping Wei*, Song-Chun Zhu, Nanning Zheng. Learning to infer human attention in daily activities. Pattern Recognition(PR), 2020. (JCR 1区,wellbet吉祥手机官网院1区,CCF B)
[3] Ben Yang, Xuetao Zhang, Feiping Nie, Badong Chen, Fei Wang, Zhixiong Nan, Nanning Zheng. ECCA: Efficient Correntropy-based Clustering Algorithm with Orthogonal Concept Factorization. IEEE Transactions on Neural Networks and Learning Systems(T-NNLS), 2022. (JCR 1区,wellbet吉祥手机官网院1区,CCF B)
[4] Songyi Zhang, Zhiqiang Jian, Xiaodong Deng, Shitao Chen, Zhixiong Nan, Nanning Zheng. Hierarchical Motion Planning for Autonomous Driving in Large-Scale Complex Scenarios. IEEE Transactions on Intelligent Transportation Systems(T-ITS), 2021. (JCR 1区,wellbet吉祥手机官网院1区,CCF B)
[5] Zhiqiang Jian, Songyi Zhang, Shitao Chen*, Zhixiong Nan, Nanning Zheng. A Global-Local Coupling Two-Stage Path Planning Method for Mobile Robots. IEEE Robotics and Automation Letters(RAL), 2021. (JCR 1区,wellbet吉祥手机官网院2区)
[6] Zhixiong Nan, Jizhi Peng, Jingjing Jiang, Hui Chen, Ben Yang, Jingmin Xin, Nanning Zheng*. A Joint Object Detection and Semantic Segmentation Model with Cross-Attention and Inner-Attention Mechanisms. Neurocomputing, 2021. (JCR 1区,wellbet吉祥手机官网院2区,CCF C)
[7] Jingjing Jiang, Zhixiong Nan, Hui Chen, Shitao Chen, Nanning Zheng*. Predicting Short-Term Next-Active-Object Through Visual Attention and Hand Position. Neurocomputing, 2021. (JCR 1区,wellbet吉祥手机官网院2区,CCF C)
[1] Zhixiong Nan#, Yang Liu#, Nanning Zheng, Song-Chun Zhu. Recognizing unseen attribute-object pair with generative model. AAAI Conference on Artificial Intelligence(AAAI), 2019. (#共同一作) (CCF-A)
[2] Jingjing Jiang, Ziyi Liu, Yifan Liu, Zhixiong Nan, Nanning Zheng*. X-GGM: Graph Generative Modeling for Out-of-Distribution Generalization in Visual Question Answering. ACM Mulitimedia(ACM-MM), 2021. (CCF-A)
[3] Jizhi Peng#, Zhixiong Nan#, Linhai Xu, Jingmin Xin, Nanning Zheng. A deep model for joint object detection and semantic segmentation in traffic scenes. International Joint Conference on Neural Networks(IJCNN), 2020. (#共同一作) (CCF-C)
[4] Xinrui Yan, Yuhao Huang, Shitao Chen, Zhixiong Nan, Jingmin Xin, Nanning Zheng*. DSP-Net: Dense-to-Sparse Proposal Generation Paradigm for 3D Object Detection on Point Cloud. International Joint Conference on Neural Networks(IJCNN), 2021. (CCF-C)
[5] Junxiang Zhan, Tangyike Zhang, Jiamin Shi, Xin Guan, Zhixiong Nan, Nanning Zheng∗. A Dual Closed-loop Longitudinal Speed Controller Using Smooth Feedforward and Fuzzy Logic for Autonomous Driving Vehicles. IEEE International Conference on Intelligent Transportation Systems(ITSC), 2021.
[6] Qian Hou, Songyi Zhang, Shitao Chen, Zhixiong Nan, Nanning Zheng*. Straight Skeleton Based Automatic Generation of Hierarchical Topological Map in Indoor Environment. IEEE International Conference on Intelligent Transportation Systems(ITSC), 2021.
[7] Zhiqiang Jian, Songyi Zhang, Shitao Chen, Tangyike Zhang, Zhixiong Nan, Nanning Zheng*. Obstacle-Centered Trajectory Planning for Autonomous Mobile Robot. IEEE International Conference on Intelligent Transportation Systems(ITSC), 2021.
[8] Xiao Wang, Jing Wen, Zhixiong Nan, Juwang Shi, Linhai Xu and Nanning Zheng. A general and practical path planning framework for autonomous vehicles. IEEE International Conference on Intelligent Transportation Systems(ITSC), 2016.
[9] Zhixiong Nan#, Yang Feng#, Jiawei He, Ping Wei, Linhai Xu, Hongbin Sun, and Nanning Zheng. Scene-guided region proposal re-ranking method for on-road vehicle candidate generation. IEEE Intelligent Vehicles Symposium(IV), 2019. (#共同一作)
[10] Zhixiong Nan, Menghan Pan, Xiao Wang, Ping Wei, Linhai Xu, Hongbing Sun, and Nanning Zheng. Exploring the potential of using semantic context and common sense in on-road vehicle detection. IEEE Intelligent Vehicles Symposium(IV), 2018.
[11] He Zhang, Zhixiong Nan*, Tao Yang, Yifan Liu, Nanning Zheng. A Driving Behavior Recognition Model with Bi-LSTM and Multi-Scale CNN. IEEE Intelligent Vehicles Symposium(IV), 2020. (*通讯作者)
[12] Tao Yang, Zhixiong Nan*, He Zhang, Shitao Chen, Nanning Zheng. Traffic Agent Trajectory Prediction Using Social Convolution and Attention Mechanism. IEEE Intelligent Vehicles Symposium(IV), 2020. (*通讯作者)
[13] Dantong Zhu, Yuhao Huang, Shengqi Wang, Shitao Chen, Zhixiong Nan, Nanning Zheng. Multi-scale Key Points Regression for Lane Detection. IEEE Intelligent Vehicles Symposium(IV), 2021.
[14] Zhuo Yang, Yuhao Huang, Xinrui Yan, Shitao Chen*, Jun Sun, Jinpeng Dong, Ziyi Liu, Zhixiong Nan, Nanning Zheng. MuRF-Net: multi-receptive field pillars for 3D object detection from point cloud. IEEE Intelligent Vehicles Symposium(IV), 2020.
[15] Kongtao Zhu, Junxiang Zhan, Shitao Chen*, Zhixiong Nan, Nanning Zheng. ATV navigation in complex and unstructured environment containing stairs. IEEE Intelligent Vehicles Symposium(IV), 2020.
特别说明
1. 欢迎重庆大学以及其他学校的应届生报考我的硕士生;
2. 欢迎重庆大学以及其他学校的本科生到我课题组实习,早日接触研究;
3. 欢迎自动驾驶、人机交互相关的企业、研究所共同探讨生产研究中的切实需求,一起解决实际问题。
Tips for 初学者
人工智能、自动驾驶、计算机视觉、深度学习的初学者:
这里不定期更新一些入门且好用的教程、代码、工具等,wellbet吉祥手机官网能对初学者有所帮助。也欢迎大家将找到的优秀的资源分享在这里(可邮箱联系我)!
1. Python编程学习
2. 一位机器学习工程师的博客主页
3. Facebook Detectron2 代码
4. Kaggle 教程,包含计算机视觉、机器学习、增强学习等
说明:部分链接可能需要外网支持

